PG S6E6: Redshift, Color Geometry, and OOF Artifact Blending
PG S6E6: Redshift, Color Geometry, and OOF Artifact Blending
Competition link:
Playground Series S6E6
Kaggle code:
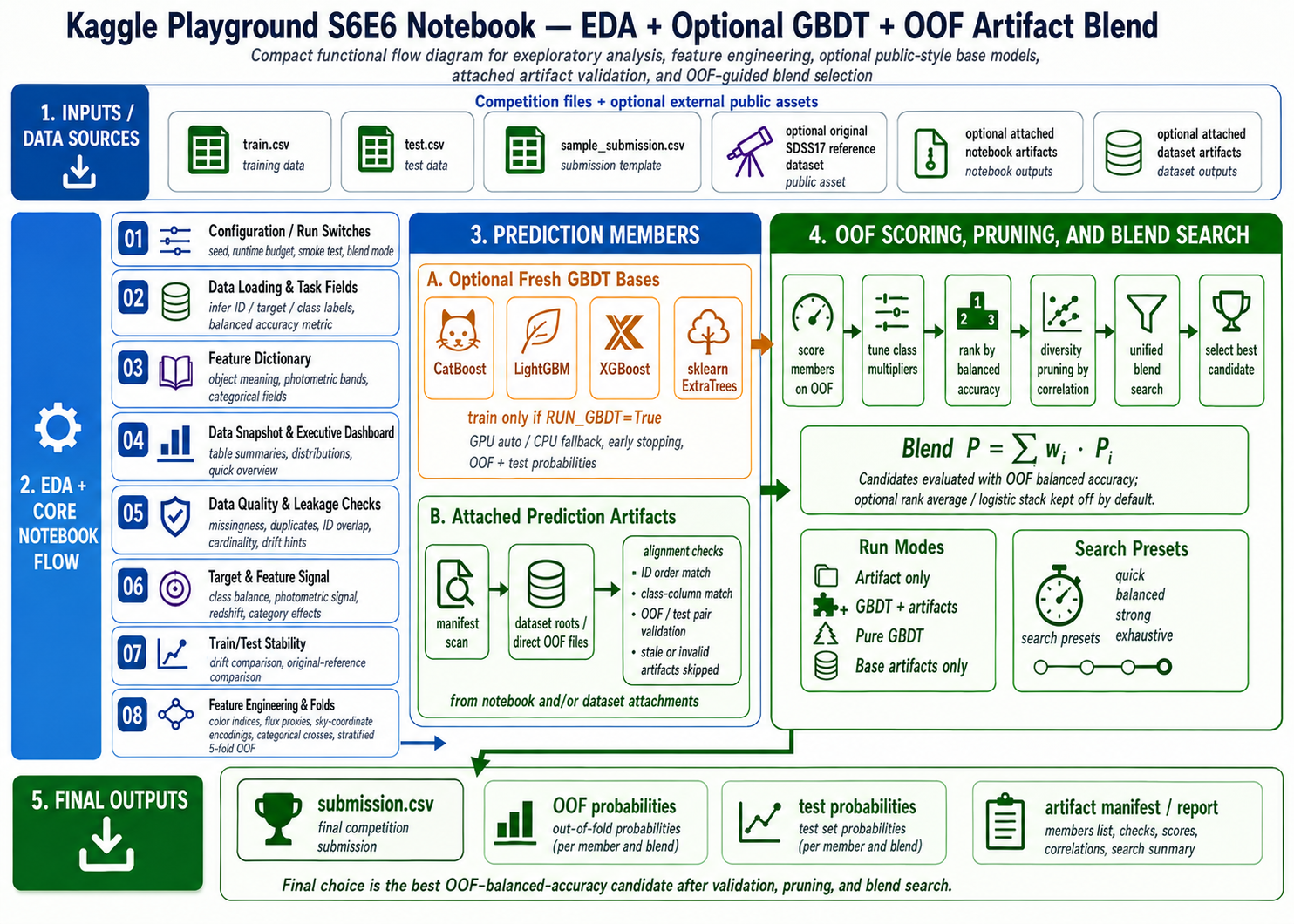
PG S6E6 EDA + GBDT Bases + Artifact Blend
The modeling object is a metric-aware probability system for stellar-class labels.
The task is a three-class hard-label classification problem:
1
GALAXY / QSO / STAR
The scoring metric is balanced accuracy, so the central question is not:
Which model gets the most rows correct?
It is:
Which model preserves recall across all three astrophysical classes?
That distinction determines the EDA, the feature engineering, the fold design, the artifact intake rules, the blend search, and the final class multipliers.
Dependency order: metric first, feature meaning second, OOF evidence third, and blend calibration last.
The selected blend reaches:
| Quantity | Value |
|---|---|
| Best single OOF BA | 0.968129 |
| Selected blend OOF BA | 0.969191 |
| OOF BA gain | +0.001062 |
| OOF log loss | 0.091453 |
| OOF macro-F1 | 0.952234 |
The OOF gain is a small residual correction on top of a strong artifact member.
1. The Metric Comes First
The train distribution is imbalanced:
| Class | Share |
|---|---|
GALAXY | 0.653818 |
QSO | 0.202899 |
STAR | 0.143283 |
Under ordinary accuracy, a model can lean toward GALAXY and still look strong. Under balanced accuracy, each class receives equal metric weight:
For this competition, K = 3. The score is therefore an average of recall for GALAXY, QSO, and STAR.
This changes the optimization target from row-level correctness to class-wise coverage. Class-weighted training and OOF class-multiplier search follow directly from this objective.
The corresponding inverse-prior style weights are:
| Class | Train Share | Weight |
|---|---|---|
GALAXY | 0.653818 | 0.509826 |
QSO | 0.202899 | 1.642856 |
STAR | 0.143283 | 2.326397 |
The meaning is straightforward: being wrong on STAR is not numerically rare noise. It is one third of the official metric.
2. What The Dataset Is Really Saying
The raw input table is compact:
| Feature Family | Columns |
|---|---|
| sky position | alpha, delta |
| photometric magnitudes | u, g, r, i, z |
| redshift | redshift |
| categorical context | spectral_type, galaxy_population |
The statistical reading does not treat all columns as generic tabular fields. Each column is interpreted by the physical information it carries.
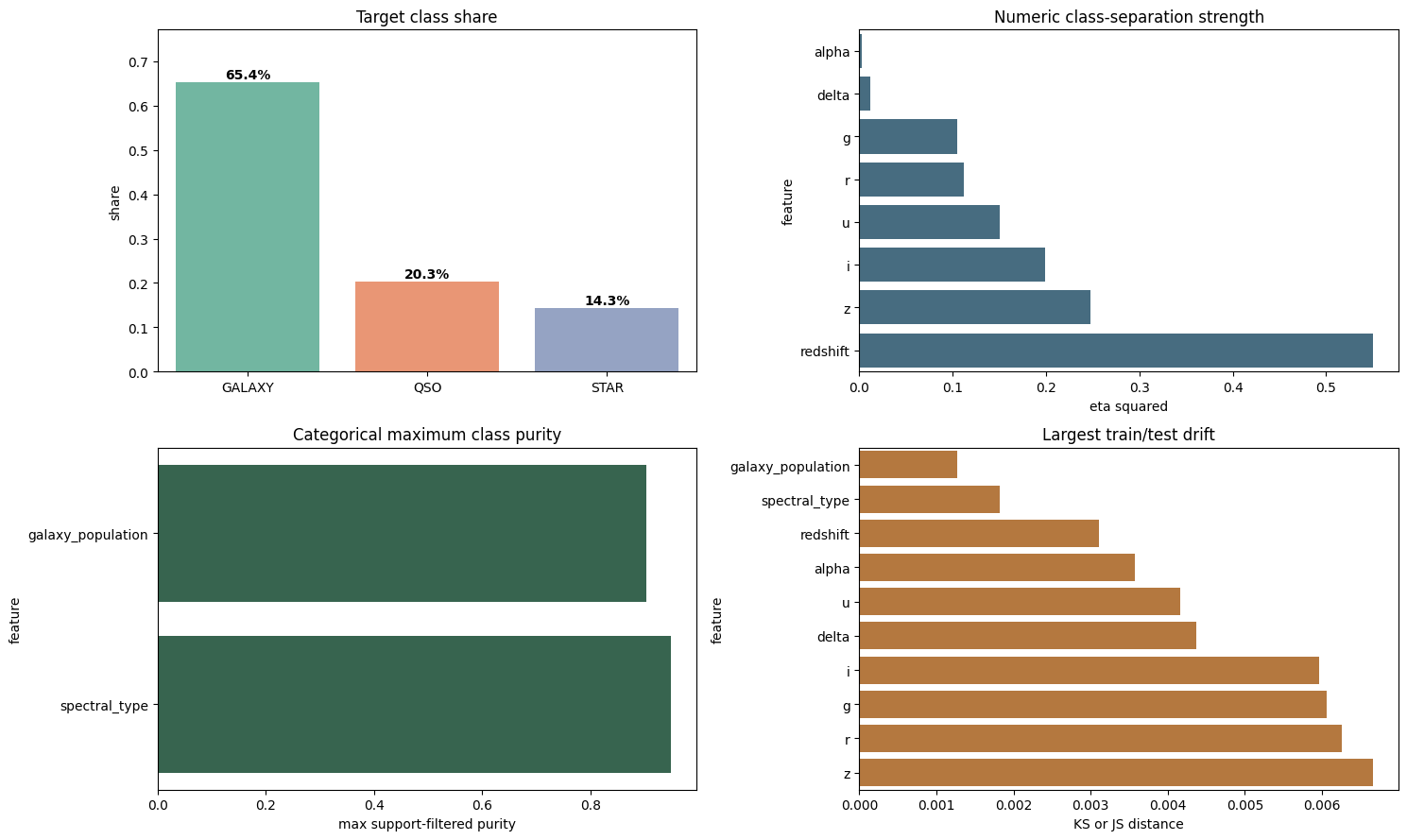
The first signal is that redshift dominates the raw numeric screen. The effect-size screen reports:
| Feature | eta squared |
|---|---|
redshift | 0.55006 |
z | 0.24737 |
i | 0.19920 |
u | 0.15091 |
r | 0.11217 |
g | 0.10464 |
The statistic here is an effect-size view. One way to read eta squared is:
\[\eta^2 = \frac{\text{between-class variation}} {\text{total variation}}\]So redshift is not merely correlated with the target. It explains a large share of class-separating variation.
The second signal is categorical purity. The strongest categorical field, spectral_type, reaches a maximum support-filtered class purity of about 0.94956. galaxy_population reaches about 0.90285.
These values do not mean the categorical variables solve the problem. They mean the tree models should be allowed to exploit categorical splits, and the feature engineering should preserve interactions between categorical context and photometric/redshift behavior.
3. Redshift Is A Separator, Not A Complete Rule
The redshift distribution explains why the problem is easy in some regions and ambiguous in others.
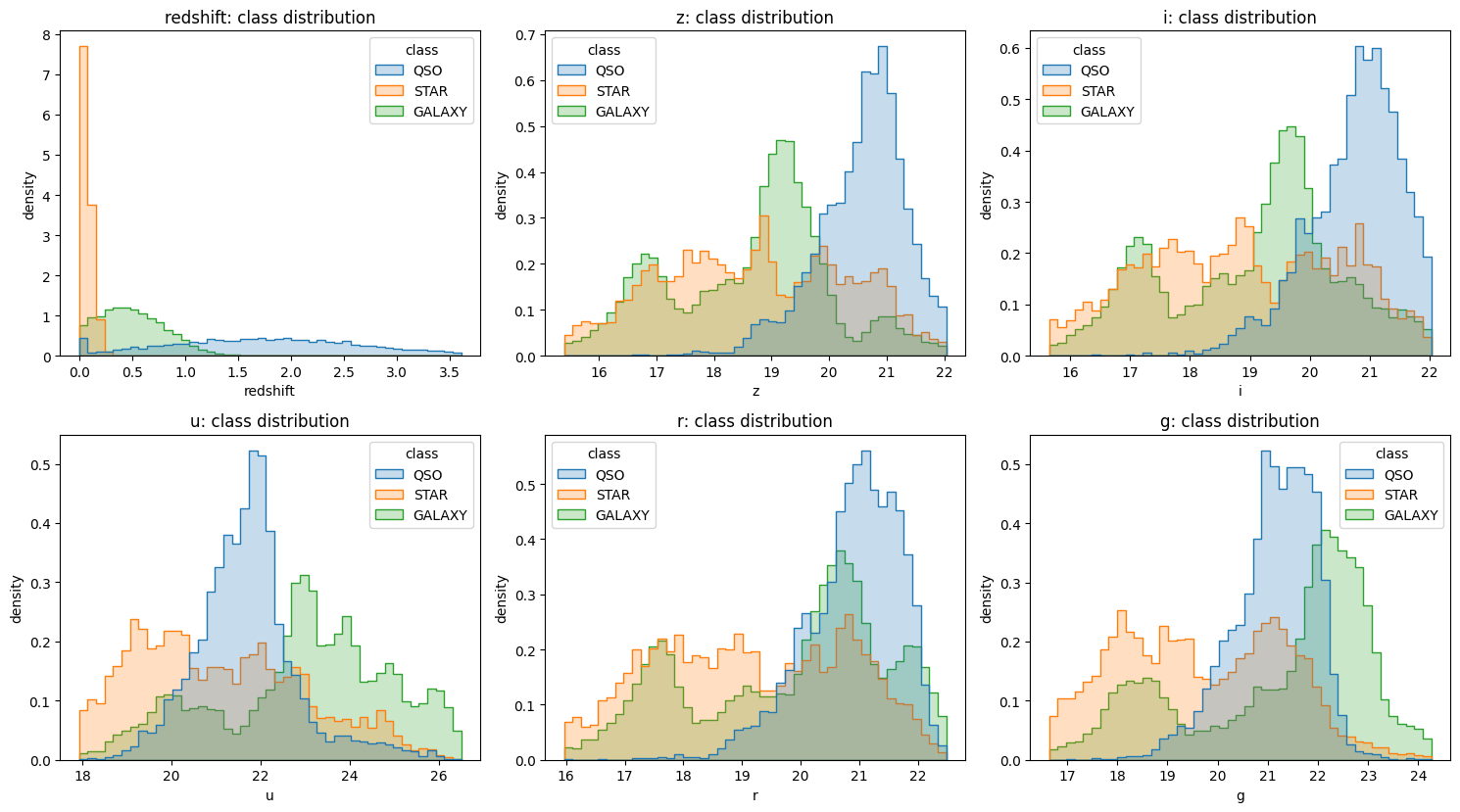
The class medians tell the story:
| Class | Redshift Median |
|---|---|
STAR | 0.05649 |
GALAXY | 0.48196 |
QSO | 1.79889 |
The intuition is:
1
2
3
STAR -> near-zero redshift
GALAXY -> moderate redshift
QSO -> often high redshift
But this is not a hard rule. There is overlap near low redshift and in the broad magnitude distributions. That overlap is where a probability model matters.
If one made a crude rule such as:
\[\hat{y} = \begin{cases} \text{STAR}, & z_{\text{redshift}} < \tau_1 \\ \text{QSO}, & z_{\text{redshift}} > \tau_2 \\ \text{GALAXY}, & \text{otherwise} \end{cases}\]it would capture part of the physical structure but fail in mixed regions. A richer representation uses redshift as one axis inside a broader feature space.
4. Why Magnitude Becomes Color
The five band columns u, g, r, i, z are magnitudes. Magnitudes are logarithmic measurements, so differences between magnitudes are more physically meaningful than many raw comparisons.
The key transformation is a color index:
\[\operatorname{color}_{a,b} = m_a - m_b\]Because astronomical magnitude relates to flux by:
\[m \propto -2.5\log_{10}(F)\]a magnitude difference is equivalent to a flux ratio:
\[\frac{F_a}{F_b} = 10^{-0.4(m_a - m_b)}\]The feature set therefore contains both:
1
2
u_minus_g, g_minus_r, r_minus_i, i_minus_z, ...
flux_ratio_u_g, flux_ratio_g_r, ...
This is not decorative feature expansion. It is a way to turn raw band brightness into spectral shape.
The median color heatmap makes this clear:
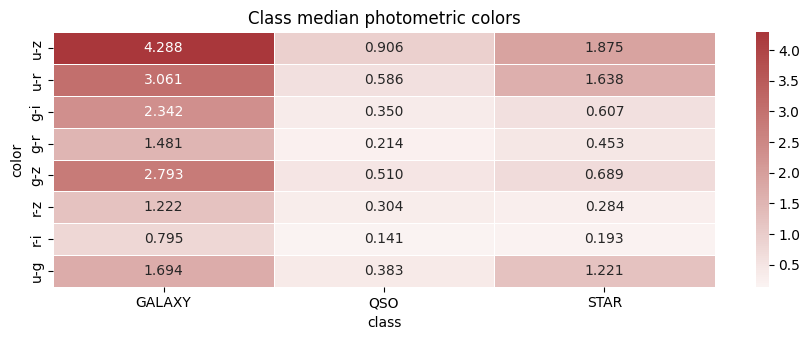
For example:
| Color | GALAXY | QSO | STAR |
|---|---|---|---|
u-z | 4.288 | 0.906 | 1.875 |
u-r | 3.061 | 0.586 | 1.638 |
g-i | 2.342 | 0.350 | 0.607 |
g-r | 1.481 | 0.214 | 0.453 |
The GALAXY median is much redder in these broad colors. QSO is comparatively flatter across these bands. STAR sits in between for some colors and overlaps heavily elsewhere.
This motivates a feature family rather than a single feature:
| Feature Family | Why It Exists |
|---|---|
| color differences | capture spectral slope and class separation |
| flux ratios | express the same color relation in a multiplicative scale |
| magnitude summaries | summarize overall brightness and shape |
| redshift interactions | let color behavior depend on redshift |
The scatter of redshift and u-z shows why this interaction matters:
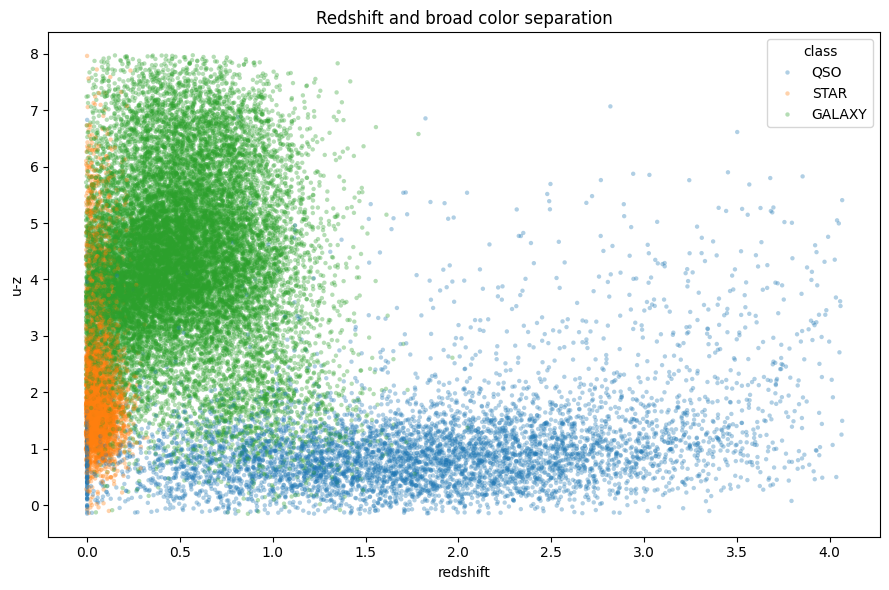
There are visible class regions, but they are not linearly separable everywhere. This is the ideal setting for GBDT models: many meaningful axes, nonlinear thresholds, and local interactions.
Snippet: color and flux-ratio features
1
2
3
4
5
6
7
8
9
10
11
12
13
color_pairs = [
("u", "g"), ("g", "r"), ("r", "i"), ("i", "z"),
("u", "r"), ("u", "i"), ("u", "z"),
("g", "i"), ("g", "z"), ("r", "z"),
]
for a, b in color_pairs:
color = out[a] - out[b]
out[f"{a}_minus_{b}"] = color
out[f"{a}_div_{b}"] = safe_divide(out[a], out[b])
out[f"flux_ratio_{a}_{b}"] = np.power(
10.0, -0.4 * color.clip(-50, 50)
).astype("float32")
5. Why Redshift Is Expanded
redshift has the strongest raw effect size, but a single real-valued feature can still be awkward for tree models and neural artifacts. It is expanded into several forms:
| Feature | Role |
|---|---|
redshift_abs | handle negative or near-zero behavior symmetrically |
redshift_sq | amplify high-redshift regimes |
redshift_log1p | compress long right tail |
redshift_signed_log1p | preserve sign while compressing scale |
near_zero_redshift | mark likely stellar or local objects |
high_redshift | mark quasar-like regimes |
very_high_redshift | isolate extreme QSO-like cases |
Conceptually, this is a basis expansion:
\[x \rightarrow \phi(x) = \left[ x,\ |x|,\ x^2,\ \log(1+x_+),\ \mathbf{1}(|x|<0.1),\ \mathbf{1}(x>1),\ \mathbf{1}(x>2) \right]\]This lets different model families use the same physical feature in different ways. A tree can split on high_redshift. A neural artifact can use the smooth transformed value. A blend can benefit from both.
The feature space also includes interactions such as:
\[\text{redshift} \times (u-z)\]The modeling meaning is:
A color difference may imply different classes depending on where the object sits in redshift space.
That is the right interpretation for a mixed stellar/galaxy/quasar classification task.
6. Astronomy-Oriented EDA Geometry
Astronomy-oriented EDA geometry sits closer to the measurement process than a plain feature-importance table. The useful signals are not just “which column is strong”; they are where the class boundary bends and which feature families should be trusted as priors rather than labels.
Categorical association can be summarized with Cramer’s V:
where r and c are the contingency-table dimensions. The two categorical fields are not decorative:
| Feature | Cramer’s V With Class | Modeling Meaning |
|---|---|---|
galaxy_population | 0.59349 | strong population prior |
spectral_type | 0.52480 | strong spectral prior |
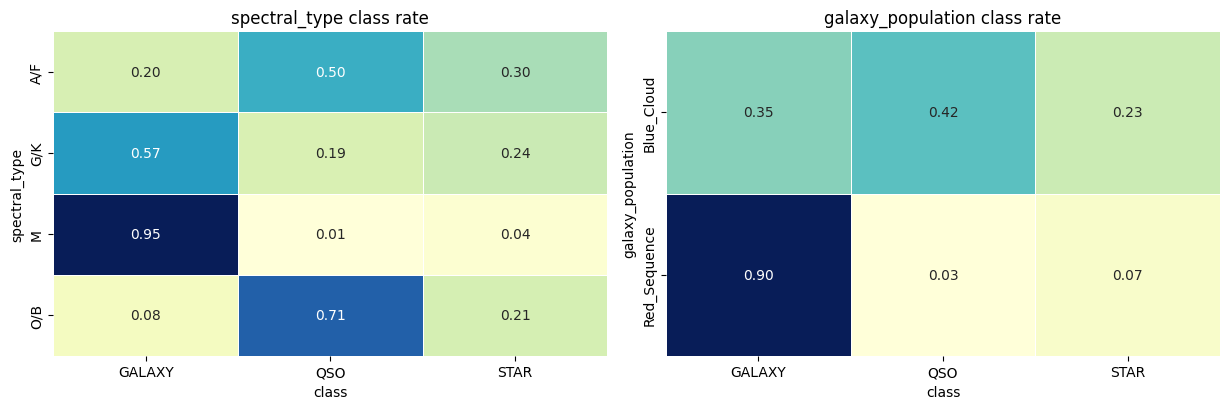
The heatmap explains why categorical variables are preserved and crossed with redshift flags. M is almost entirely GALAXY; O/B leans heavily toward QSO; Red_Sequence is mostly GALAXY. But Blue_Cloud remains mixed, and several spectral groups still contain nontrivial minority classes. So these fields should act as high-quality priors, not deterministic replacement labels.
The color-color plane then shows why the magnitude features are expanded into multiple color differences instead of reduced to one brightness score.
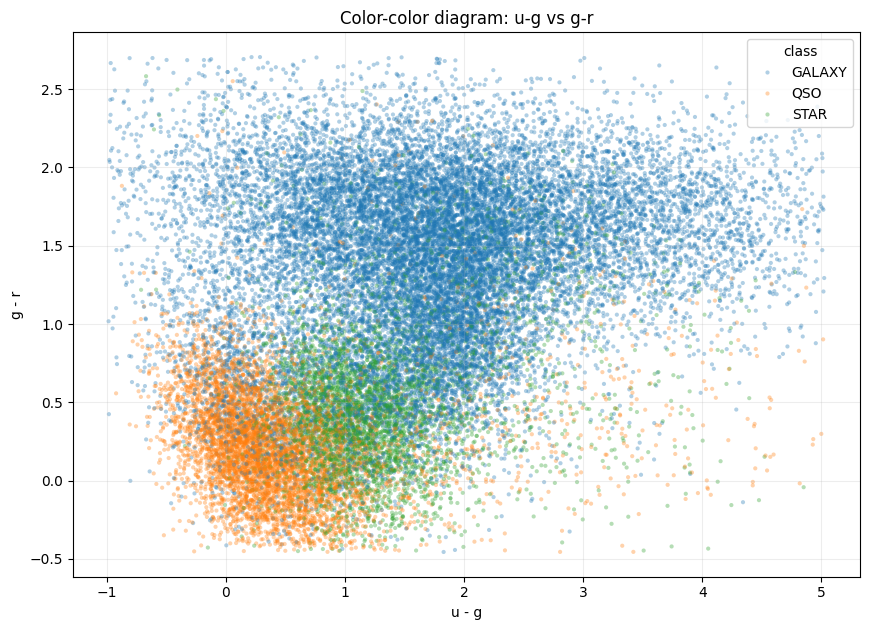
The two axes:
\[\Delta_{ug}=u-g, \qquad \Delta_{gr}=g-r\]approximate adjacent spectral slopes. QSO occupies a lower g-r band, GALAXY forms a large higher g-r cloud, and STAR overlaps both in the middle. That overlap is important: color geometry creates strong regions, but not an axis-aligned rule. GBDT splits and neural probability artifacts are therefore useful because they can represent curved and locally mixed decision surfaces.
The redshift ECDF makes the threshold logic more explicit:
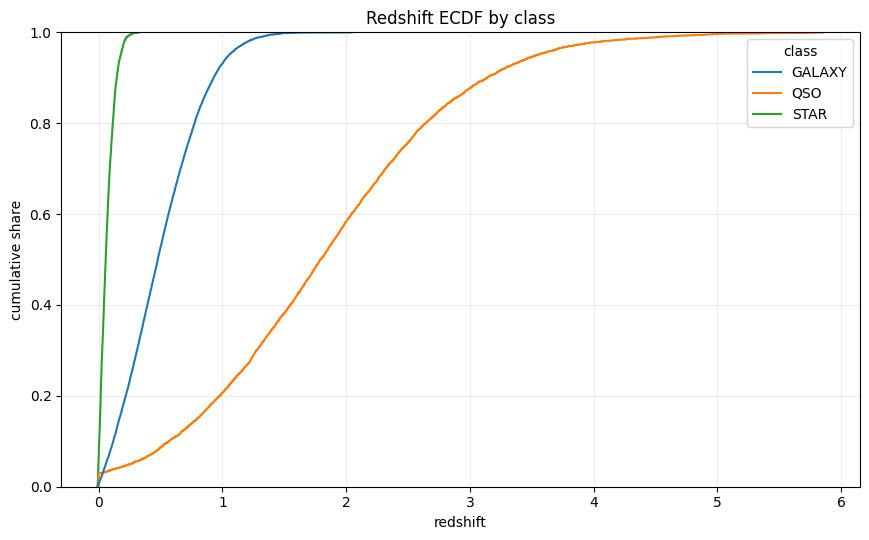
For class c, the curve is:
STAR accumulates near zero redshift, GALAXY occupies the intermediate regime, and QSO keeps a long high-redshift tail. This supports the explicit flags near_zero_redshift, high_redshift, and very_high_redshift. Those flags are not arbitrary bins; they mark different parts of the class-conditional cumulative distribution.
The dataset-level ECDF view separates competition drift from original-reference drift:
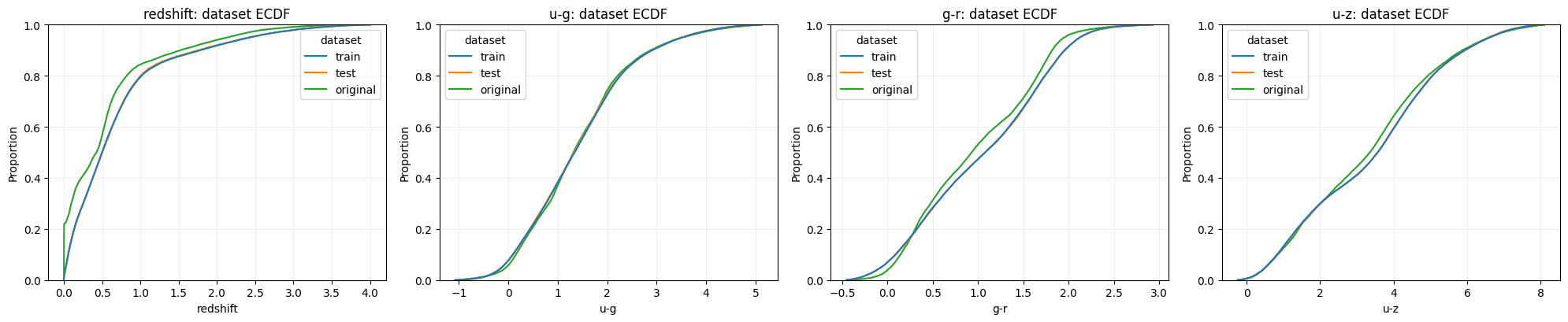
Train and test nearly overlap for redshift, u-g, g-r, and u-z. The original reference table is visibly different, especially in redshift and some photometric tails. The raw diagnostic table also shows -9999 sentinel values in original u, g, and z, while competition train/test have no such sentinel counts. That makes the original data useful for physical intuition, but risky as an unweighted validation proxy.
Finally, alpha and delta should be treated as sky geometry rather than ordinary independent numeric columns.
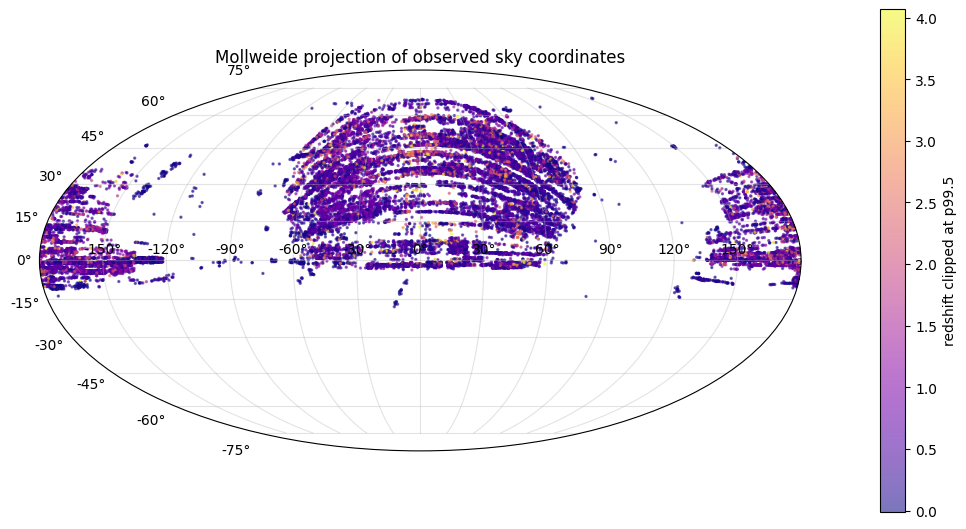
The projection shows a survey footprint, not a uniformly sampled sphere. Coordinate position may encode selection effects, but right ascension also wraps at 0 degrees / 360 degrees. Periodic and spherical encodings are safer than raw-angle-only splits:
Snippet: sky geometry and categorical crosses
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
alpha_rad = np.deg2rad(out["alpha"])
delta_rad = np.deg2rad(out["delta"])
out["alpha_sin"] = np.sin(alpha_rad).astype("float32")
out["alpha_cos"] = np.cos(alpha_rad).astype("float32")
out["delta_sin"] = np.sin(delta_rad).astype("float32")
out["delta_cos"] = np.cos(delta_rad).astype("float32")
out["sky_x"] = out["delta_cos"] * out["alpha_cos"]
out["sky_y"] = out["delta_cos"] * out["alpha_sin"]
out["sky_z"] = out["delta_sin"]
out["spectral_population"] = (
out["spectral_type"].astype(str)
+ "__"
+ out["galaxy_population"].astype(str)
)
out["spectral_highz"] = (
out["spectral_type"].astype(str)
+ "__highz_"
+ out["high_redshift"].astype(str)
)
The full modeling consequence is:
| EDA Geometry | Feature Consequence |
|---|---|
| categorical class-rate heatmaps | keep categorical features and use categorical crosses |
| color-color overlap | use many color differences and flux-ratio transforms |
| class-wise redshift ECDF | add redshift basis expansion and threshold flags |
| train/test ECDF alignment | trust competition OOF more than original-reference validation |
| sky-coordinate footprint | encode angles periodically and add spherical coordinates |
7. Drift Checks Are About Trust
The geometry plots give the visual version of the trust question. The drift statistics quantify it: how close are the distributions that generate OOF rows and test rows?
The largest raw train/test drift is small:
| Feature | Drift Statistic |
|---|---|
z | 0.00666 |
r | 0.00626 |
g | 0.00606 |
i | 0.00596 |
redshift | 0.00311 |
For numeric features, KS-style distribution distance measures the largest gap between empirical distributions:
\[D_{KS} = \sup_x \left| F_{\text{train}}(x) - F_{\text{test}}(x) \right|\]For categorical features it uses Jensen-Shannon distance.
The conclusion is not “there is no distribution shift.” The conclusion is narrower:
The public train/test split does not show large univariate raw-feature drift.
That supports using competition-fold OOF estimates and attached artifacts, as long as those artifacts are aligned to the same competition rows.
The original SDSS17 reference is different. It has a different class prior and a much larger redshift distribution shift against the competition train table:
| Comparison | Signal |
|---|---|
original STAR share minus competition train STAR share | +0.07266 |
original vs competition redshift KS | 0.19553 |
This is why the original reference is useful for feature intuition but dangerous as an unexamined training distribution. It can inform the astrophysical reading; it should not silently define the validation target.
8. OOF As Evidence
Probability sources are not interchangeable until they earn trust through OOF behavior:
Every probability source must first behave well on rows it did not train on.
For row i, OOF prediction means:
where k_i is the validation fold containing row i, and f_{-k_i} is trained without that fold.
This matters because in-sample predictions answer the wrong question. They ask:
How well can the model describe rows it already saw?
OOF predictions ask:
How well does this modeling recipe behave on unseen rows drawn from the same training distribution?
OOF serves four roles:
| OOF Role | Meaning |
|---|---|
| score fresh GBDT bases | estimate each model’s metric contribution without training-row leakage |
| validate attached artifacts | accept external probability files only if their OOF side is row/class aligned |
| prune correlation | compare members by OOF probability geometry |
| search blend weights | choose weights using the same metric the competition rewards |
This is why artifact loading is not merely a file-management step. An artifact is not trusted because it has a good name or a good public score. It is trusted only if it provides a compatible OOF probability matrix and a matching test probability matrix.
9. Fresh GBDT Bases As Local Anchors
CatBoost, LightGBM, and XGBoost are trained on the engineered feature frame. Their OOF scores are strong:
| Model | OOF BA | OOF Log Loss |
|---|---|---|
public_xgboost | 0.965352 | 0.098110 |
public_catboost | 0.964304 | 0.112588 |
public_lightgbm | 0.964266 | 0.095724 |
These models are not the final center of gravity, but they have a specific purpose:
- They verify that the engineered features are genuinely predictive.
- They provide fresh, reproducible OOF/test probability members.
- They add tree-shaped decision surfaces to a pool dominated by attached artifacts.
The strong neural artifact is better than the fresh GBDTs, but the GBDTs still matter because they make different local mistakes. That is why the final blend gives them nonzero weight.
Snippet: fold-safe GBDT probability generation
1
2
3
4
5
6
7
8
9
10
11
12
for fold in range(N_FOLDS):
trn_idx = np.where(fold_id != fold)[0]
val_idx = np.where(fold_id == fold)[0]
model.fit(X_train.iloc[trn_idx], y[trn_idx])
oof[val_idx] = normalize_probs(
model.predict_proba(X_train.iloc[val_idx])
)
test_probs += normalize_probs(
model.predict_proba(X_test)
) / N_FOLDS
The averaged test prediction is:
\[\hat{p}^{\text{test}} = \frac{1}{K} \sum_{k=1}^{K} f_{-k}(x_{\text{test}})\]That keeps the validation and test prediction recipes aligned.
10. Artifact Blending Is A Second-Order Model
The strongest single member is:
| Member | Source | OOF BA |
|---|---|---|
realmlp_pytorch_5fold_6epoch | attached artifact | 0.968129 |
The selected blend is not trying to replace it. It is trying to correct it.
Let p_m(x) be the probability vector from member m. A probability blend is:
The final selected weights show the intended behavior:
| Member | Weight |
|---|---|
realmlp_pytorch_5fold_6epoch | 0.62239 |
public_lightgbm | 0.18710 |
realmlp_seed2026_full_fullrows_fullorig_5fold | 0.05725 |
public_catboost | 0.05381 |
| high-score stack artifact | 0.03036 |
| RealMLP full artifact | 0.02729 |
public_xgboost | 0.02071 |
| Cat artifact | 0.00110 |
This is not democratic averaging. It is a dominant-member blend. The best artifact keeps most of the mass; GBDT and other artifacts become structured residual corrections.
That is the reason the gain is small but plausible. A model pool with already strong members rarely gains by averaging everything. It gains by finding the few places where another model’s probability geometry improves class recall.
11. Correlation Pruning Prevents Fake Diversity
Many artifacts have impressive scores but extremely high OOF correlation. That is expected: many tabular pipelines learn similar class boundaries from the same redshift/color/categorical signal.
The pruning logic asks:
\[\rho_{ij} = \operatorname{corr} \left( \operatorname{vec}(P_i^{OOF}), \operatorname{vec}(P_j^{OOF}) \right)\]If a lower-scoring member has near-duplicate OOF probabilities against an already-kept member, it contributes little except extra blend search noise.
Examples from the kept pool:
| Pair | OOF Corr | Disagreement |
|---|---|---|
| RealMLP PyTorch vs public XGBoost | 0.990921 | 0.018535 |
| RealMLP PyTorch vs public CatBoost | 0.988360 | 0.022361 |
| RealMLP PyTorch vs public LightGBM | 0.989980 | 0.019027 |
| RealMLP PyTorch vs high-score stack | 0.985997 | 0.023951 |
Even kept models are highly correlated. That tells us the blend should be conservative.
The resulting rule is:
Diversity is not model-name diversity. Diversity is OOF error-geometry diversity.
12. Class Multipliers Are Metric Calibration
The selected blend’s raw probabilities are not the final hard labels. For balanced accuracy, the decision boundary can be adjusted by class multipliers:
\[\hat{y} = \arg\max_c \left[ \lambda_c p_c(x) \right]\]The selected multipliers are:
| Class | Multiplier |
|---|---|
GALAXY | 0.770524 |
QSO | 1.020000 |
STAR | 1.275000 |
This is an explicit correction for the metric. GALAXY is the majority class, so its probability is discounted. STAR is the smallest class, so it is promoted.
That does not mean the model is pretending STAR is more common. It means the final decision rule is tuned for equal class recall rather than maximum raw accuracy.
This is the difference between probability estimation and metric-optimal classification:
\[p(y=c \mid x) \quad \text{estimates class probability}\]but:
\[\arg\max_c \lambda_c p(y=c \mid x) \quad \text{chooses the label under the target metric}\]The final submission class share reflects this:
| Class | Train Share | Submission Share |
|---|---|---|
GALAXY | 0.653818 | 0.632223 |
QSO | 0.202899 | 0.208047 |
STAR | 0.143283 | 0.159731 |
The shift is not arbitrary. It is a consequence of optimizing recall balance.
13. Artifact Output As A Probability Object
A reusable artifact represents:
1
OOF probabilities + test probabilities + manifest + selected blend metadata
That bundle turns the final probability system into a future blend member. The artifact loop is recursive:
- It consumes prior artifacts.
- It evaluates them through OOF.
- It blends them with fresh GBDT bases.
- It emits a new validated probability artifact.
The selected output is:
| Artifact | Kind | OOF BA | OOF Log Loss | OOF Macro-F1 |
|---|---|---|---|---|
eda03_gbdt_artifact_blend | selected:dirichlet_blend_22 | 0.969191 | 0.091453 | 0.952234 |
This is why artifact hygiene matters. If each run emits row-safe OOF/test probabilities, future blends can compose them without rerunning every model. If a run emits only a submission file, most of the statistical information is lost.
14. Modeling Consequences
The modeling dependency chain is:
1
metric -> feature meaning -> OOF evidence -> probability geometry -> calibrated decision rule
The feature evidence explains why the transformations exist:
| Observation | Modeling Consequence |
|---|---|
redshift has dominant class effect size | expand redshift and interact it with colors |
| magnitudes are logarithmic | use color differences and flux ratios |
| color-color and redshift ECDF geometry are class-conditional | use nonlinear local learners rather than one-threshold rules |
| sky coordinates have survey-footprint structure | encode angular geometry instead of only raw degrees |
| categorical purity is high | preserve categorical splits and crosses |
| train/test raw drift is small | trust fold-based competition OOF more than original-reference assumptions |
| class prior is imbalanced | optimize balanced accuracy, not ordinary accuracy |
The OOF evidence explains why the blend is credible:
| OOF Evidence | Modeling Consequence |
|---|---|
| RealMLP artifact is strongest single member | make it the blend center |
| GBDTs are strong but different enough | use them as residual probability corrections |
| many artifacts are too correlated | prune fake diversity |
| class multipliers improve BA | tune hard-label rule to class-wise recall |
The final blend explains why the result is modest but meaningful:
\[0.969191 - 0.968129 = 0.001062\]On a strong tabular baseline, most remaining gain comes from small residual error corrections. The improvement is modest, but it is backed by OOF evidence rather than by a blind average.
15. Summary
Artifact blending requires the full chain of evidence: scoring metric, feature meaning, fold-safe probability generation, OOF alignment, probability correlation, and metric-calibrated hard-label decisions.
The resulting chain is:
1
2
3
4
redshift and color explain the signal
OOF explains the trust
correlation explains the pruning
class multipliers explain the final labels
The blend weights are the final numerical expression of that chain, not a substitute for it.